
D-Visionとは
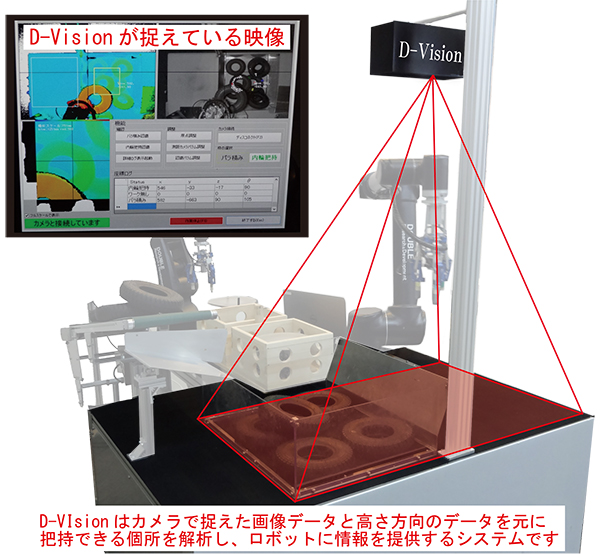
D-Vision は、TOF 距離センサを搭載した3次元計測(距離)カメラを使用し、2次元画像情報と距離情報を独自のアルゴリズムから構 成されたシステムで解析してロボットに把持可能な位置情報を提供するシステムです。
本アルゴリズムは「爪先が入るかどうか」ですので、ハンドの爪先形状を設定するだけでピッキングを開始することができます。その他に3 つのアルゴリズムを備えており、吸着やマグネットにも対応します。
簡易版( アルゴリズムを限定した) パッケージは、フル版パッケージよりも安価にご提供しています。お気軽にお問合せください。
- 3次元認識を使用していますのでワークがランダムに積まれた状態のまま扱えます。
- 幅広い用途に対応致します。様々な大きさ、形状、材質の部品に活用できます。
- 周囲の明るさの影響を受けないので、照明の調整が不要です。(暗所でも使用 可能です)
- 動作系列やワークの形状に関して現場での調整や、組み換えが可能です。
- 撮像、認識にかかる時間が短く、速いレスポンスが実現可能です。
- ソケット通信を使用しておりますので、PLC もしくは、3 軸以上のほぼ全てのロボットと接続することができます。
動画
展示会におけるデモンストレーション1台のD-Vision で、バラ積みからのピッキングと 平置きからの正確なピッキン グのワークの位置をロボットに提供しています。
共栄精工株式会社様よりの御依頼品バラ積み金属部品をピッキングし、加工機へ投入する作業をD-Vision とロボットの組み合わせで構築いたしました